传 真: 021-62315435
邮 编: 200041

|
V-REP机器人及模拟自动化软件平台

V-REP- 机器人模拟软件
V-REP是一套机器人模拟软件。让使用者可以模拟整个机器人系统或他的子系统(如传感器或机械结构)。透过详细的应用程式接口(API)与自动化指令,可以轻易整合机器人的各种功能。V-REP可以被使用在远端监控、硬件控制、快速原型验证、算法开发与参数调整、安全性检查、机器人教学与工厂自动化模拟等各种领域。
V-REP 虚拟机器人实验平台
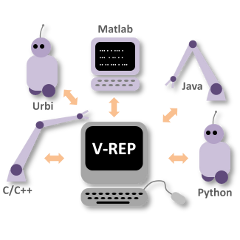
V-REP为虚拟机器人实验平台,全名为The Virtual Robot Experimentation Platform简称V-REP。V-REP机器人模拟器可以用来模拟、测试、评估及连接整个机器人系统、移动机器人、工业机器人等、或机器人次系统(机械或侦探器等等)。V-REP为一个一般的通用型的机器人模拟器,支援任何类型的机器人系统,透过其细致的功能和可扩充式应用程式接口(Application Programming Interface, API),V-REP可做到下列应用:
|
■ 工厂自动化系统模拟 |
■ 安全监测 |
V-REP可被视为一个独立运作的应用程式,也可以很轻易地嵌入客户端的应用程式中,其小尺寸且详尽的API让V-REP也可以嵌入更高级的应用程式中。一个综合性的脚本解释器(script interpreter)-Lua,让V-REP的功能更加广泛应用,其让使用者可以自由地结合高/低的功能性,而取得更高阶且更多元的功能。如果您还十分困惑、不知道V-REP可以做什么,请您从范例讲解开始,便能体验V-REP的强大模拟能力!
主要特色
|
分布式控制 |
强大API |
小巧轻便 |
|
|
|
|
|
脚本(script)驱动,透过不限数目的操作脚本同时运作(线性或非线性皆可),可完全客制化模拟机器人,同时支援C++ API函数调用。 |
拥有超过300组干净完整、高密度且齐全的API函数,也可从C/C++或Lua汇入。(也可使用其他语言程式的API调用) |
其整套应用程式约6Mb大小,无须任何附加的安装程式,模拟场景和模型可以被保存为一个压缩文件,加载操作速度极快。 |
|
动力学/物理 |
正逆向运动学 |
动态粒子 |
|
|
|
|
|
使用者可以选择一或两种物理计算引擎,来模拟真实的动力学情形与物件间的互动状况。 |
反逆向运动学计算任何类型的机制(branched, closed, redundant, containing nested loops等等),采用一种混合模式允许值计算的联合动态控制值。 |
V-REP支援可客制化的颗粒,可用于模拟空气或水射流,喷气发动机,螺旋桨等。 |
|
碰撞侦测与距离计算 |
切削模拟 |
距离传感器模拟 |
|
|
|
|
|
在几何组件中快速判断各种干扰与碰撞,以及计算多个组件间的最小距离。 |
各种定制刀具的表面切削操作模拟。 |
强大、实际、精确并可自定的距离传感器模拟。在给定的检测量下进行精确的最小距离计算。 |
|
视觉型传感器模拟 |
力与力矩传感器模拟 |
路径规划 |
|
|
|
|
|
可完全自定影像处理功能的视觉传感器模拟。 |
纪录应力与力矩,并在超过临界值时借由分离部分物件来表现过量状态 |
在二到六个物件自由度下规画完整路径,或车类载具的部分路径。 |
|
自订使用者接口 |
资料记录与视觉化 |
整合编辑模式 |
|
|
|
|
|
在整合的编辑模式下,没有数量限制的完整客制化接口元件。透过延伸模组提供视窗对话框客制化支援。 |
多种数据纪录模式,可以显示时域图、或结合起来变成座标平面图或3D图形。 |
除标准场景的编辑与组合外,还提供文本、三角、顶点、边界、路径与轨迹或使用者自定的编辑模式。 |
|
全功能场景树状图检视 |
CAD资料汇入汇出 |
完全自定的视窗检视配置 |
|
|
|
|
|
场景的组成可以直观地从树状图中检视,包含物件名称、种类、相关控制指令码、循环、可见状态与警告等等。 |
支援 DXF, 3DS, OBJ, STL (ASCII & binary)等格式`. |
场景具有8个标签,每个都能够自定不同视角与检视模式 |
|
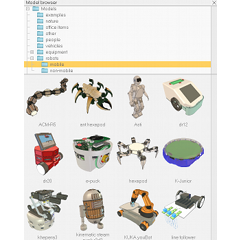
便利的模型浏览器 |
完全的互动 |
免费的播放器 |
|
|
|
|
|
整合模型浏览器支援场景建立时的拖拉操作,数据库随版本更新。 |
在模拟过程中,模型可以在不更动程式码的情形下被移动、旋转、复制贴上、重设尺寸与删除。 |
允许使用者执行与操作建构好的模拟场景。 |