

传 真: 021-62315435
邮 编: 200041

|
ST Robotics是英国一家工业机器人企业(以下简称ST),ST提供专业但价格实惠的、易于使用、方便装箱携带的机器人,参照编程手册就可以将其设置并开始使用。ST机械手简单可靠的机械力学设计;平稳、快速,并准确的数字位移控制;采用模块化电子设备、高速驱动器;可扩展的输入/输出能力的多处理器控制器;RoboForth——最友好的机器人编程语言。简单、友好、高效、低成本、更坚固耐用,能更广泛地应用于工业建设。
ST机械手的高智能使他可以非常完美地适用于各种复杂的工作。同时,能很容易地使用于从“机械送料”到“实验室样品处理”等各种工作。因为资金短缺以及出于成本的考虑,人们考虑并着眼于廉价机械手,ST机械手销售也正在不断上升。
与许多工业机械手(例如汽车生产工厂使用的机械手)相比,ST机械手是比较安全的,因为它们较弱。此外因为ST机械手是步进电机驱动,一旦出现失步现象系统将回馈一个错误而不会进行下一步动
通过机器人技术的推广和深入应用,把人从简单繁琐的事物中解脱出来,全面延伸人的体力和智力,实现生产数字化、自动化、网络化以及智能化。
Dr.David Sands全球机器人控制语言RoboForth的发明者
Dr.Mathew Monforte
美国国家航空航天局机器人终端应用首席科学家
产品介绍:
R12是一个整体结构的5轴/6轴关节型机器人,是一个性价比极高的台式自动化方案,在其腕部安装夹手、吸盘以及各类特殊机构可以实现多种功能的处理。R12是是一个有工业标准的质量、可靠性和性能的专业工具
R12技术特点
R12是一个整体结构的5轴/6轴关节型机器人
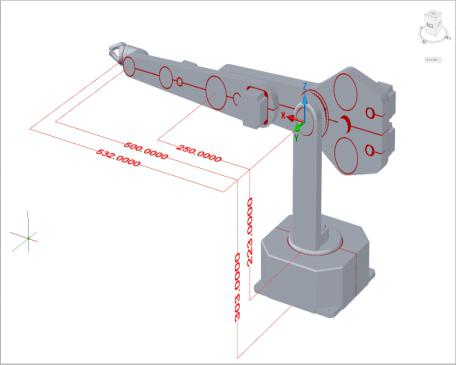
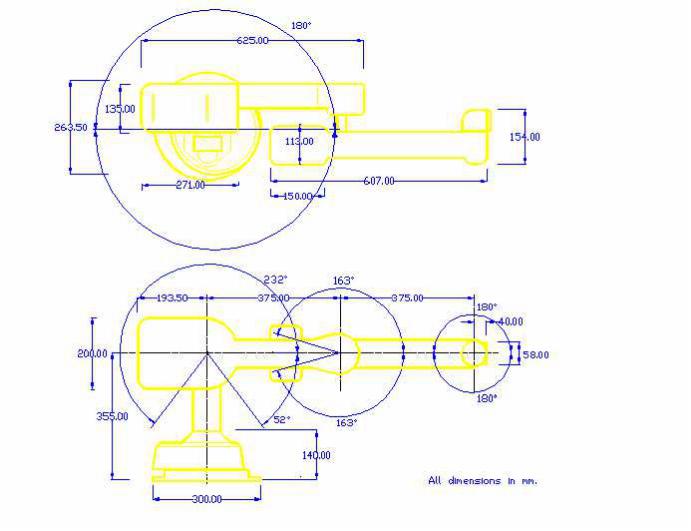
R12工作范围
工作范围是一个直径为1000MM的球体范围
技术参数
R12技术参数
驱动器:高效微步步进电机,可随意选配编码器
运动范围:任意方向500MM/20INS;腰部360度
重复精度:0.1MM
负载:最大1KG
最大速度:
肩部180度/秒,肘部270度/秒,腰部180度/秒
标准一周时间:1.5秒
最大的转矩:2NM
重量:
机器人12.8KG/29LBS,控制器11KG/25LBS
电源:110/240V AC 420VA
平均无故障时间:10,000 小时
外观:高强度红色LED遍布机械手全身辨别障碍物作用
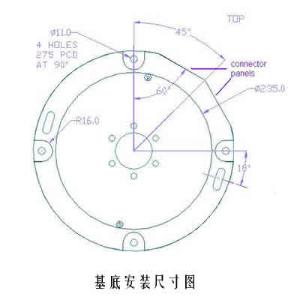
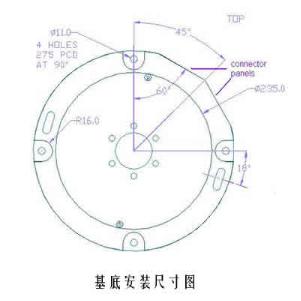
安装尺寸
底座安装尺寸

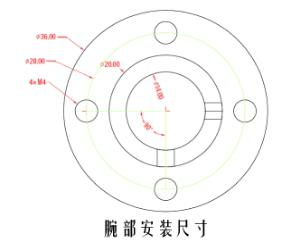
腕部尺寸
腕部安装尺寸
R12可选配件
在腕部安装夹手、吸盘以及各类特殊机构可以实现多种功能的处理
R17机器人
R17是一个整体结构的5轴/6轴关节型机器人,在其腕部安装夹手、吸盘以及各类特殊机构可以实现多种功能的处理。负重型R17机器人最高可负载8Kg物体。R17具有更大的行程空间以及更高的负重范围。

技术参数
R17技术参数
驱动器:高效微步步进电机,可随意选配编码器
运动范围:任意方向750MM/30INS;腰部360度
重复精度:0.1MM
负载:最大5KG
最大速度:
肩部100度/秒,肘部180度/秒,腰部120度/秒
标准一周时间:1.5秒
最大的转矩:4NM
重量:
机器人20.5KG/46LBS,控制器11KG/25LBS
电源:110/240V AC 420VA
平均无故障时间:10,000 小时
外观:白色粉末涂层加真空模块ABS塑料包装
安装尺寸
底座安装尺寸 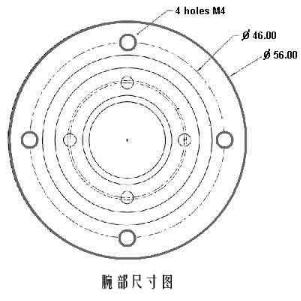
腕部尺寸
腕部安装尺寸
R19是一个整体结构的550mm标准范围、4轴机器人。R19拥有标准速度:腰部180度/秒,抓举500mm/秒,延伸500mm/秒,腕部360度/秒,标准负载:2Kg,是一个针对需要进行高效应用场景的专业工具。
技术参数
R19技术参数
驱动器:高效微步步进电机,可随意选配编码器
范围:最大549MM;最小149MM
抓举行程:501MM
速度:
标准:
腰部180度/S 抓举500MM/S 延伸500MM/S 腕部360度/S
加强:
腰部180度/S 抓举750MM/S 延伸750MM/S 腕部360度/S 精度:标准:0.075MM, 加强:0.15MM
载荷:2KG
重复精度:+/-0.1MM
重量:14.5KG(机器人)
电源:110/115/220/240V AC 250VA
平均无故障时间:10,000HOURS
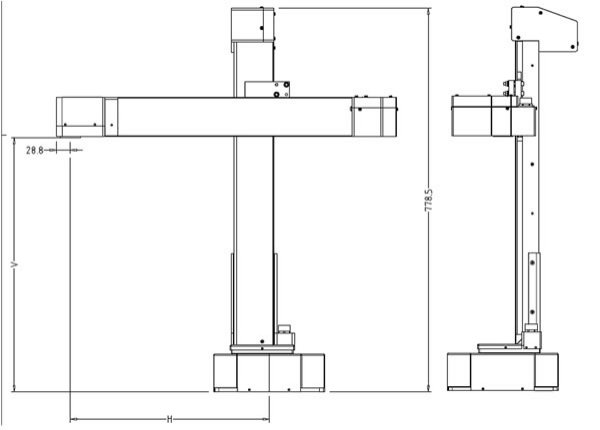
安装尺寸
底座安装尺寸
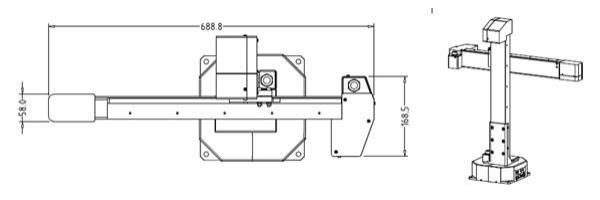
腕部尺寸
腕部安装尺寸
安装轨道
R12、R17、R19可选择安装在滑动轨道上增加机器人的行程
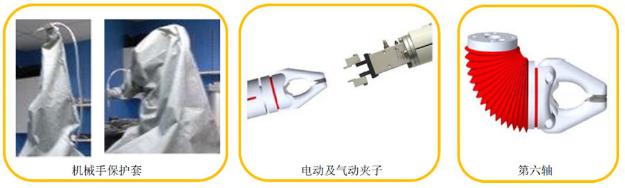
拥有新型电动、气动、真空吸附以及组合式夹爪,迅速、抓力强、结构紧凑、时尚简单可靠的机械力学设计;根据不同的需求配备感应开关等工具;工具切换装置可以使专用工具之间的切换更加便利;
Electric fulcrum gripper for R12 - E1,Fulcrum (scissors action) version E1:Fully open the tips are 30mm apart.Closing force 10N.
Electric fulcrum gripper for R12 - E2,E2 is similar to E1 but has short jaws for the user to attach own fingers.Closing force 10N.
E3 electric gripper for R12, parallel action, also suitable for R17,Stroke: 6mm; open 10mm, closed 4mm.Stroke and jaws identical with SMC-16D,Closing force: 35N.The customer can make fingers to suit the product and attach to the gripper jaws.
Pneumatic grippers for R12 and R17,Small pneumatic grippers suitable for R12 using SMC MHZ2-10D (approx 6mm stroke).Larger pneumatic grippers for R17, R19 using SMC MHZ2-16D (approx 8mm stroke).The customer can make fingers to suit the product and attach to the gripper jaws.
Heavy duty electric gripper for R17,Suitable when compressed air is not available. The customer can make fingers to suit the product and attach to the gripper jaws.Stroke: 12.5mm (1/2 inch) (6.25mm per finger),Gripping force: 20N,Closing speed: 500mS
Vacuum pickup,Available for all models, configured to suit the application.Supplied with Venturi and valve ready for use.
Tool changer system for R17,In order to switch between gripper and vacuum pickup (left), or between other types of tools or your own devices,The option comprises,tool changer adaptor for robot,tool changer, robot side,tool changer, tool side,adaptor between tool changer and tool,stand (cradle) for unused tools
Tool changer system for R12,Robot side and tool side shown.The changer is entirely electric but has pass-thrus for electrics and pneumatics. It can pick up an electric tool e.g. electric gripper or pneumatic gripper or vacuum pickup, dispenser etc.Like R17 it is supplied with a stand if required.

